Разработка технологии автономного вождения и её применение к транспортным средствам — одно из самых интригующих направлений в развитии автопрома, которое изменит сознание людей и их отношение к мобильности.
Как оценить уровень автономности и зрелость технологии? Для этого была разработана классификация по системе SAE (Society of Automotive Engineers), где L1 — умные помощники, которые помогают водителю в экстренных ситуациях, а L5 — полная автоматизация, при которой не предусмотрены органы управления для водителя.
Какой путь проходит транспортное средство до момента становления полностью автоматизированным — разобрались. Но остаётся открытым вопрос, что умеет делать беспилотный автомобиль, особенно когда речь идёт об уровне L5.
Мы решили определить для себя функционал полностью автономного транспорта, опираясь на правила дорожного движения (ПДД) — по аналогии с тем, какими навыками должен обладать опытный водитель.
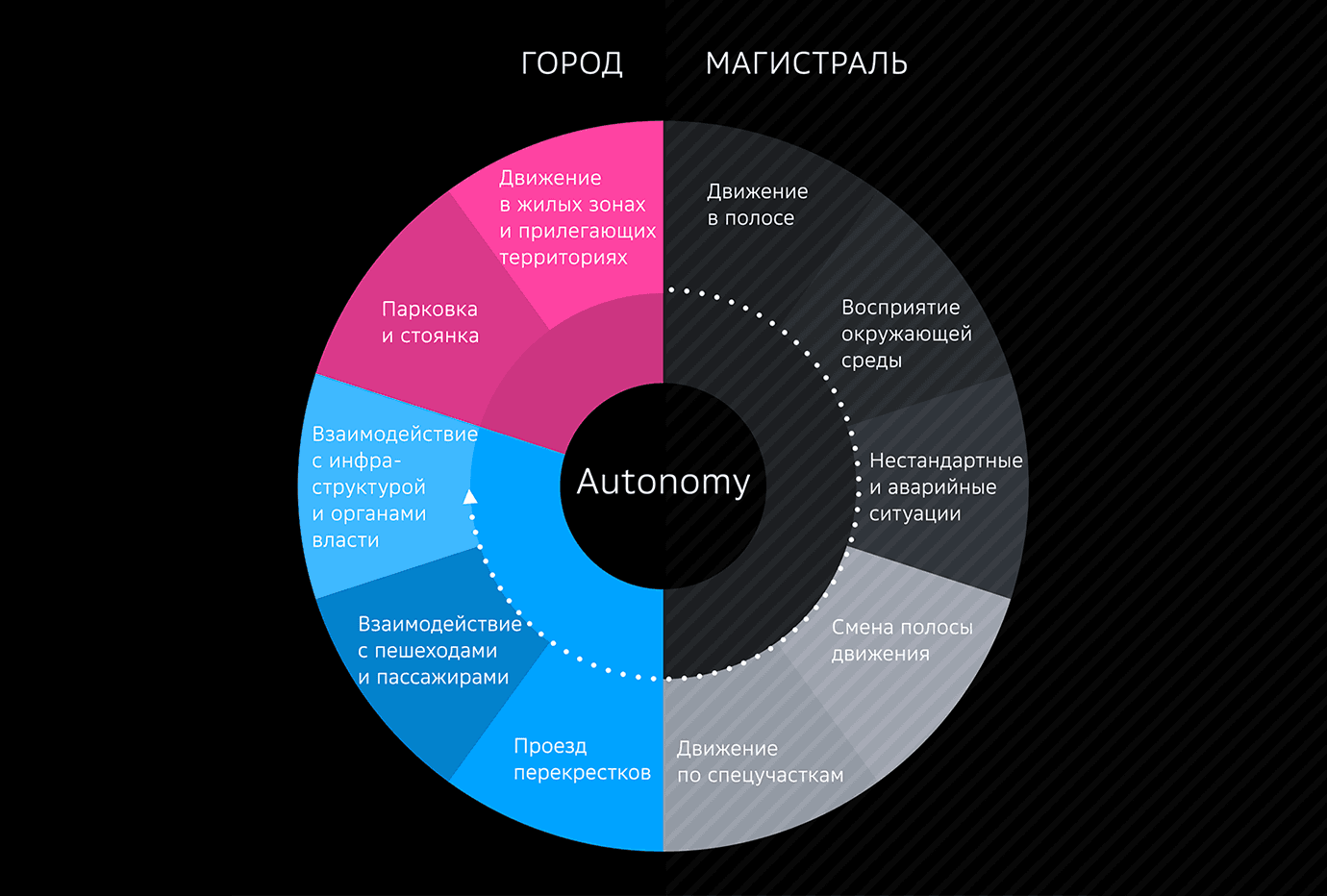
Полученные сценарии мы систематизировали и объединили в десять классов функций, где функция — это определённое действие или манёвр. 100% из них будут работать в условиях города — самой сложной среде с точки зрения плотности трафика, различных схем и инструментов организации дорожного движения, пешеходов и нестандартных ситуаций.
Дальше перед нами стояла задача определить самые востребованные функции при движении автомобиля по скоростной магистрали. Для этого мы исследовали трассу М-11 от Москвы до Санкт-Петербурга на всём круговом маршруте и зафиксировали, сколько раз встречается тот или иной сценарий.
Базовые функции, например «Движение и удержание в полосе» и «Восприятие окружающей среды», работали на протяжении всего маршрута — 100% времени. А более специфические встречались реже: так, «Проезд участков с дорожными работами» в среднем составил 6%.
В итоге мы получили статистику по основным сценариям и частоте их появления на трассе М-11.

Инфраструктура магистрали не предполагает наличия пешеходов, перекрёстков и парковок, поэтому при движении по ней беспилотный автомобиль чаще всего будет использовать пять основных функций. Именно они стали нашим фокусом в развитии и адаптации технологии автономного вождения применительно к платформе магистрального тягача.

Начнём с базовых функций, без которых невозможно представить движение автомобиля по дороге. Именно они работают 100% времени по пути следования автономного грузовика.
Восприятие окружающей среды
Благодаря сенсорсету (лидары, радары и камеры) ИИ-водитель видит окружающее его пространство на 360° даже в сложных условиях погоды и освещения. Он распознаёт и классифицирует статические и динамические объекты вокруг себя: проезжую часть, полосы движения и разметку, транспортные средства, пешеходов, дорожные знаки, сигналы светофоров, ограждения при ремонтных работах и другие объекты, которые могут влиять на высокоавтоматизированное транспортное средство (ВАТС) как участника дорожного движения.
Движение и удержание в полосе
В рамках полосы для автономного тягача существует целевая зона движения — это его ширина +10% в обе стороны. Чтобы оставаться внутри своей полосы, ВАТС регулирует скорость в зависимости от наличия других участников дорожного движения в попутном направлении, а также тех, кто пересекает линию его полосы или едет очень близко к ней в соседнем ряду. Если на пути ВАТС появляется статичный объект, который оно не может объехать на текущей скорости без выезда за пределы разметки, то запускается функция смены полосы.
Смена полосы движения
Перестроение необходимо при сужении или расширении проезжей части, обгоне или объезде других транспортных средств или статичных объектов, выезде с разгонной полосы или съезде на полосу торможения, обочину. После завершения манёвра управление передается функции удержания в полосе.
Основные пять функций делятся на подклассы и разрастаются в большую систему. Рассмотрим самые популярные сценарии на магистрали в рамках классов функций «движение по спецучасткам» и «нестандартные ситуации».
Движение по спецучасткам
Сценарий «проезд пункта оплаты» начинается с первого знака ограничения скорости — ВАТС замедляется. Считывая информацию с табло, оно перестраивается в полосу для оплаты транспондером. При проезде пункта: останавливается, ждёт зелёного света и открытия шлагбаума. Возобновляя движение, ВАТС перестраивается в правую полосу, пропуская другие транспортные средства согласно приоритетам. После первого знака, снимающего ограничения, набирает скорость — участок пройден.
Нестандартные и экстренные сценарии
Дорожные работы — один из сложных сценариев даже для обычного водителя. Нужно учесть все знаки об ограничении скорости или изменении движения в полосах, распознать временную разметку, конусы или бетонные блоки, двигаясь во временной полосе, и восстановить скорость после снятия ограничений. Несмотря на существующие стандарты, на практике ремонт дороги может выглядеть совершенно по-разному, но это не должно влиять на умение ВАТС успешно их идентифицировать и проезжать.