The development of autonomous driving technology and its application to vehicles is one of the most intriguing directions in the evolution of the automotive industry, one that will change people’s perception and their attitude towards mobility.
How can we assess the level of autonomy and the maturity of the technology? For this, the SAE (Society of Automotive Engineers) classification was developed, where L1 refers to smart assistants that help the driver in emergency situations, and L5 is full automation, where no driver controls are provided.
We have examined the path a vehicle takes before becoming fully automated. But the question remains: What can an autonomous vehicle do, especially when it comes to Level 5?
We decided to define the functionality of fully autonomous transport based on road traffic rules (RTR) — similar to the skills an experienced driver should possess.
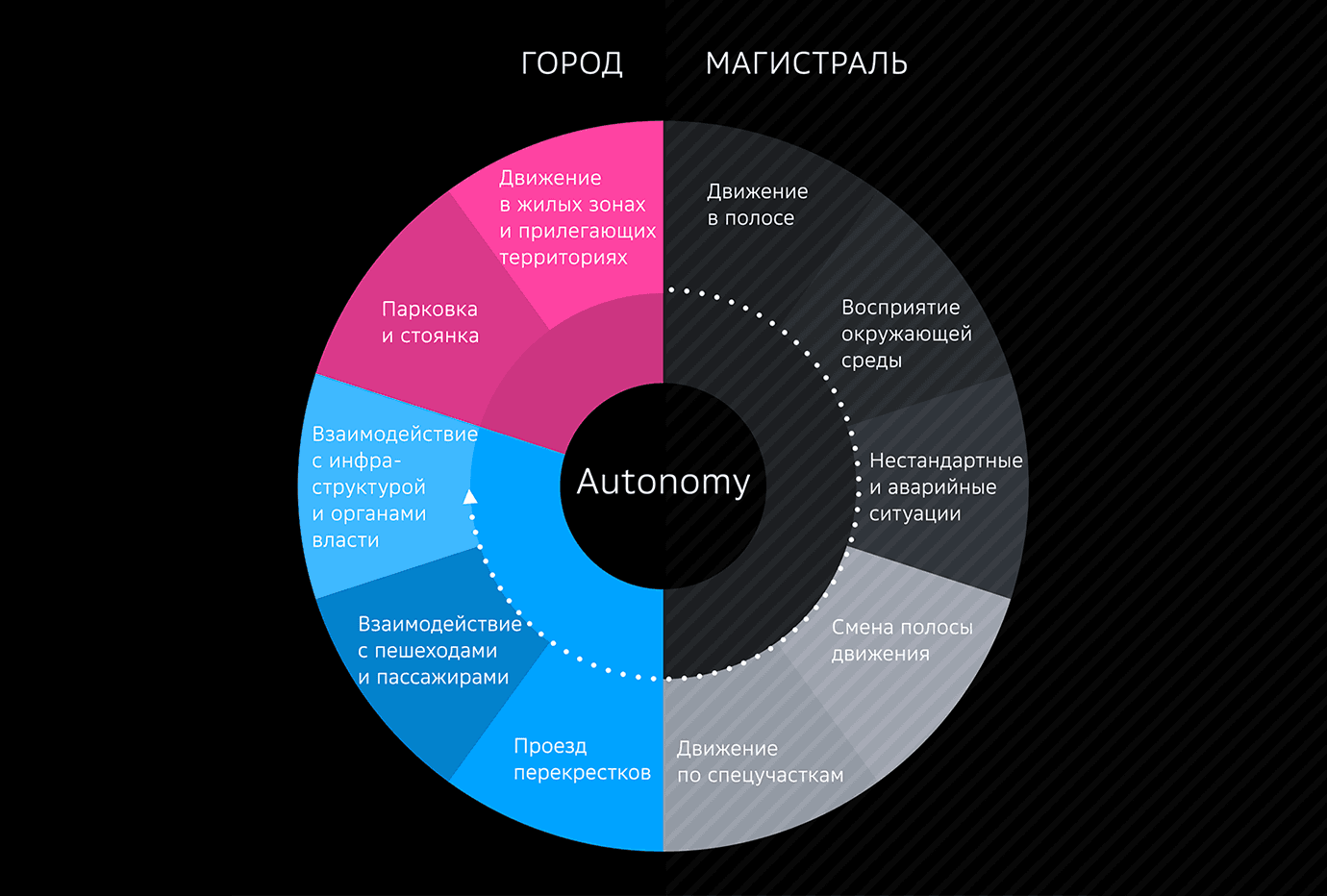
The resulting scenarios were systematised and combined intoten functional classes, where a function is a specific action or manoeuvre.100% of these will operate in urban environments — the most complex setting in terms of traffic density, various road layouts, pedestrians, and non-standard situations.
Next, we faced the task of identifying the most in-demand functions for driving on a high-speed motorway. To do this, we studied the M-11 motorway from Moscow to St. Petersburg along the entire circular route and recorded how often each scenario occurred.
Basic functions, such as "Driving and Lane Keeping" and "Environment Perception", worked throughout the entire route — 100% of the time. More specific ones appeared less frequently: for example, "Passing Road work zones" accounted for an average of 6%.
As a result, we obtained statistics on the main scenarios and their frequency on the M-11 motorway.

The motorway infrastructure does not include pedestrians, intersections, or parking areas, so when driving on it, an autonomous vehicle will most often use five primary functions. These became our focus in developing and adapting autonomous driving technology for long-haul trucking platforms.

Let’s start with the basic functions, without which it is impossible to imagine a vehicle moving on the road. These operate 100% of the time during the autonomous lorry’s journey.
Perception
Thanks to its sensor suite (lidars, radars, and cameras), the AI-driver sees its surroundings in 360°, even in challenging weather and lighting conditions. It detects and classifies static and dynamic objects around it:
- the roadway, traffic lanes, and markings.
- other vehicles, pedestrians, road signs, and traffic lights.
- barriers during roadworks and other objects that may affect the Highly Automated Vehicle (HAV) as a road user.
Lane control
Within its lane, the autonomous lorry has a target driving zone—its width plus 10% on both sides. To stay within the lane, the HAV adjusts its speed depending on the presence of other road users travelling in the same direction, as well as those crossing into its lane or driving too close in the adjacent lane. If a static obstacle appears in its path that it cannot avoid at the current speed without leaving the lane, the lane-changing function is activated.
Lane_Control_1_1_2b88dc6885.mp4
Changing Lanes
Lane changes are necessary when:
- The road narrows or widens.
- Overtaking or passing other vehicles or static obstacles.
- Entering an acceleration lane or exiting onto a deceleration lane/shoulder.
After completing the manoeuvre, control is handed back to the lane-keeping function.
Driving through special zones
The scenario "Passing a toll booth" begins when the first speed limit sign appears — the HAV slows down. Reading information from overhead displays, it moves into the transponder payment lane. At the toll booth, itstops, waits for the green light and the barrier to rise. Upon resuming movement, the HAV merges into the right lane, yielding to other vehicles according to priority rules. After the first sign lifting the restrictions, it accelerates—the section is complete.
Emergency Scenarios
Roadworks are one of the most challenging scenarios, even for a human driver. The system must:
- recognise all speed limit signs and lane changes.
- detect Temporary markings, cones, or concrete barriers.
- adjust speed while moving in a temporary lane.
- resume speed after restrictions end.
Despite existing standards, roadworks can vary significantly in practice — but this should not affect the HAV’s ability to identify and navigate them successfully.